 (0757)22666666
(0757)22666666


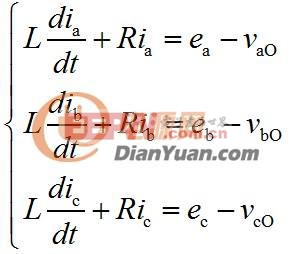
,V为桥臂中点电压,等效阻抗压降UR=iR,等效电感压降UL=jwLi,(电压超前

也便是说这种拓扑的逆变器或许作业在四象限,可整流可逆变可变功率因数,故常成为“变流器”。
(A)、式子能够精确的看出V与i是相互影响的,确认了i就确认了v,确认了v就确认了i.
(C)、直承受咱们操控的是6个开关管的通断,当6个开关管的通断状况确认时,V处的电压也跟着确认。
下面将这三步分隔剖析,不一定依照这一个次第来,先剖析简略的。半途需求涉及到其他常识的,也提早先列出来。

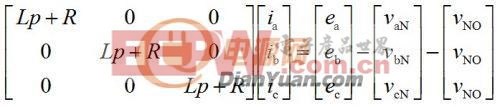
换个写法,用矩阵来表明,核算的时分好核算。用p表明微分算子,则上面的式子能够表述为:
在三相体系中,常见的有三种坐标系:三相停止坐标系(abc)、二相停止坐标系(alpha-beta)、二相旋转坐标系。
往常见的ABC散布在平面上,互差120°便是三相停止坐标系。因为这个是二维平面,用二个不必向的矢量就能够表述整个平面上的向量,因而用平面上二个笔直的坐标系就能够表明三相坐标系中的量,即为二相停止坐标系。在三相或二相停止坐标系中,各个量(电压电流。。。)都是余弦函数,是个改变的数值。这二种坐标系的的特点是坐标轴都是固定的,数值是改变的。核算起来也费事。
假如咱们将坐标轴依照电压或电流的频率来旋转,在轴上通一幅值为电压或电流最大值的直流量时,就发现这个直流量在停止坐标系上的投影便是电压或电流在停止坐标系下的值。便是说这二种办法要表达的结果是相同的,仅仅是表达的办法不相同算了。这种坐标系(二相旋转坐标系)的特点是坐标轴旋转,数值是直流量。
1、停止坐标系下得量是一个改变的数值,用PI调理(现在用的最多的办法)时要盯梢的是一个改变量,这样必定会有差错!(静态差错或叫静差,这从理论上就无法消除)
2、二相旋转坐标系的坐标轴是二个笔直的量,挑选好参阅视点,就能够用一个轴表明有功一个轴表明无功,这样很简单操控变流器的功率因数,而这个参数在并网时是有严格要求的。
三相变流器常用的的调制办法有二种办法:SPWM和SVPWM,SPWM是经过查正弦表完成,SVPWM是经过矢量改换得到,其间SVPWM具有更高的电压利用率。这儿侧重叙述一下SVPWM调制办法。
以看出 U的轨道为一个幅值等于相电压峰值,角频率等于正弦电压角频率按逆时针方向匀速旋转的圆。也便是三相正弦电压每一个时刻在三相坐标轴上的组成矢量对应着矢量圆上的一个点。而矢量圆上的每一个点都对应着三相正弦电压一个周期内的一个视点。(下面用这个观念)
下面再回头看看三相半桥。不考虑死区时各个桥臂的开关状况总是互补的。不会一起通也不会一起断(断了相当于这一桥臂没起效果,死区时刻很短,暂不考虑)。
咱们把上桥臂导通下桥臂关断界说为1,下桥臂导通上桥臂关断界说为0.则三相桥臂一共有2的三次方=8种状况。
在ABC=100时(表明A的开关状况为上通下断,BC的状况都为下通上断。下面的用法类同)。
已然确认有几个根本矢量能够组成想要的矢量。那么接下来的作业便是确认用那几个根本矢量(便是选用哪一组导通状况),核算出每个矢量应该效果的时刻(便是确认每一组导通状况所保持的时刻)。
因为PWM信号的生成是经过守时器的实践值与比较值CMPR比较所得,因而最终要做的便是将每一组导通状况的保持时刻变成守时器中的比较值CMPR写入寄存器中。



